


این مقاله را به صورت پادکست گوش دهید:
 الکتروموتور شناور چیست؟
الکتروموتور شناور چیست؟
در این مقاله، با استفاده از تجارب عملی و اطلاعات فنی موجود در این رشته درباره اصول ساختمان، طرزکار، انتخاب وسایل قطع و وصل و کابل مناسب، روشهای خودکارسازی و حفاظت طرق مختلف راه اندازی، انتخاب دیزل ژنراتور مناسب و تعمیر و نگهداری الکتروموتور های شناور صحبت خواهد شد.
به خاطر استفاده وسیع از الکتروپمپ های شناور، سرمایه زیادی صرف ساخت، نصب و نگهداری و بهرهبرداری از این دستگاهها می شود. موقعی می توانیم از الکتروپمپ ها و هر دستگاه دیگری، با راندمان بهتر و هزینه کمتر استفاده کنیم که به شکل ساختمانی، اصول کارکرد، نحوه انتخاب و کارگذاری صحیح و نیز طرز عیب یابی و نگهداری آن آشنایی کافی داشته باشیم.
انتخاب صحیح الکترو پمپ با راندمان کار مناسب، هزینه انرژی مصرفی موتورپمپ را پایین می آورد و نصب و نگهداری صحیح، طول عمر دستگاه را بالا می برد.
به همین منظور و جهت آشنایی علاقه مندان و دست اندرکاران این رشته، مقالاتی تقدیم خواهد شد که امید است مورد استفاده واقع شود.
تاریخچه الکتروموتور های شناور
ساختن الکتروموتور های شناور برای اولین بار در سال 1918 مطرح شد و هدف از طرح این مسئله آن بود که هم الکتروموتور و هم پمپ بتوانند در داخل مایع مورد پمپاژ غوطه ور شده و انرژی لازم جهت چرخاندن پمپ توسط کابل الکتریکی که آسانترین وسیله انتقال انرژی هست انجام گیرد.
در سال 1932 اولین الکتروموتور شناور توسط سازنده آلمانی به بازار عرضه گردید جهت روغن کاری یاتاقانها و خنک کردن سیم پیچی الکتروموتور از آب استفاده شده بود.
عایق سیم پیچی از لاستیک ضد آب که می توانست تحت ولتاژ و بدون آن که به عایق صدمهای برسد در داخل آب کار کند. امروز، به خاطر حل شدن مسائل مربوط به عایق سیم پیچی، الکتروموتور های شناور تا 6000 ولت و قدرت چند هزار کیلووات ساخته می شود.
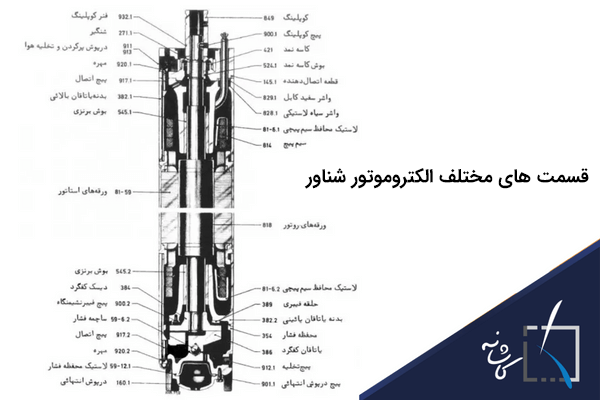
ساختمان الکتروموتور شناور
از نظر ساختمان، الکتروموتور شناور سادهترین نوع ماشین الکتریکی گردان هست و شبیه همه ماشینهای الکتریکی جریان متناوب از دو قسمت تشکیل یافته است.
 قسمت ساکن یا استاتور
قسمت ساکن یا استاتور
لوله فولادی استوانهای شکل بدنه خارجی الکتروموتور های شناور را تشکیل می دهد. در داخل این لوله ورقهای مغناطیسی استوانهای شکل توخالی قرار دارند و شیارهای طولی در امتداد این استوانه و در قسمت داخلی آن جهت سیمپیچی تعبیه شدهاند.
در ابتدا و انتهای استاتور محفظههای یاتاقان قرار دارند. جهت نگهداری روتور در مقابل نیروی وارد از آب به محور موتور پمپ، در انتهای بدنه استاتور محفظه یاتاقان کف گرد قرار دارد. این یاتاقان نیز توسط آب روغنکاری می شود.
قسمت گردنده یا روتور
در روی محور فولادی قسمت گردنده ورقهای مغناطیسی به شکل استوانه و به تعداد ورقهای مغناطیسی، استاتور قرار داده می شود. در سطح خارجی این ورقها شیارهای طولی موازی هم و در امتداد محور تعبیه شدهاند.
در داخل این شیارها میلههای مسی قرار گرفته که در دو انتها توسط حلقههای مسی، اتصال کوتاه می شوند. به طوری که مرسوم است این نوع رو تورها را روتورهای قفس سنجابی می نامند و لذا الکتروموتور های شناور از نوع الکتروموتورهای القائی قفس سنجابی هستند. یادآوری می شود که در موقع ساخت، تمامی روتورها از نظر دینامیکی بالانس می شوند.
خنک کاری در دستگاه های الکتروموتور
با توجه به اینکه در داخل سیمپیچی و نیز خارج الکتروموتور آب قرار دارد، مسئله خنک کاری توسط آب به نحو احسن انجام می گیرد و همین مسئله امکان استفاده وسیع را از الکتروموتور به وجود می آورد. حداکثر درجه حرارت مایع مورد پمپاژ که الکتروموتور می تواند در داخل کار کند بستگی به قدرت و نوع الکتروموتور دارد. این مقدار درجه حرارت برای تیپهای مختلف در جدول 1 نشان داده شده است. مثلاً الکتروموتور تیپ ya و قدرت 22 کیلووات در مایع مورد پمپاژ با درجه حرارت حداکثر تا 30 درجه سانتیگراد می تواند کار کند.
روغنکاری یاتاقان ها
تمام یاتاقان های موجود در الکتروموتور توسط آبی که قبلاً داخل موتور ریخته می شود روغن کاری می شوند. هم چنین در تمام الکتروموتور های شناور ساخت شرکت پمپیران یاتاقان کف گرد توسط آب داخل موتور روغنکاری و خنک کاری می شود.
در بعضی از الکتروموتورهای ساخت سایر سازندگان، یاتاقان کف گرد قطعه مجزایی از موتور هست که داخل آن با محفظه داخل موتور هیچ نوع ارتباطی ندارد و آب داخل موتور نمی تواند به داخل محفظه یاتاقان کف گرد وارد شود. جهت روغنکاری یاتاقان از یک نوع روغن سنگین ضد خورندگی استفاده می شود.
سیمپیچی استاتور
برای سیمپیچی از مسی با عایق واترپروف استفاده می شود. خود عایق از دو لایه پلی تن و پلی آمید به عنوان حفاظ مکانیکی بر روی لایه پلی تن بکار رفته است.
با چنین سیمهایی موتورهای 5/ 1 الی 300 اسب در 3000 دور و 5 الی 600 اسب در 1500 دور ولتاژ تا 1000 ولت فرکانس 50 هرتز را می توان ساخت. نحوه تعمیر و سیمپیچی مجدد، بعداً به طور مفصل شرح داده خواهد شد.
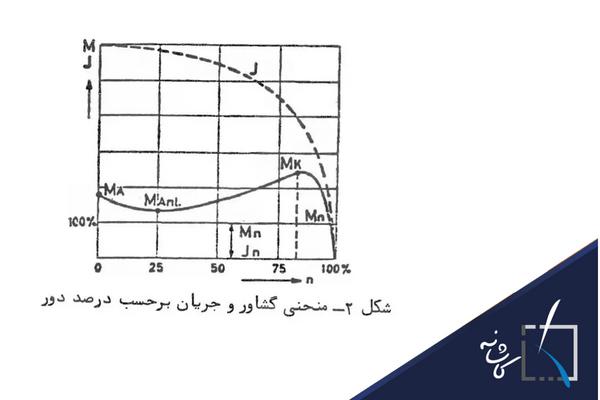
شکل زیر مشخصات گشتاور و جریان برحسب در صد دور الکتروموتور را نشان می دهد. در این شکل n درصد دور j جریان برحسب آمپر و ma گشتاور راهاندازی mani گشتاور متوسط و mk گشتاور ماکسیمم برحسب متر کیلوگرم هست. مقایر ms در دور صفر و Mme در 25 % دور نامی و Mma در 75 % الی 85 % دور نامی الکتروموتور هستند.در هر حال مقدار گشتاور نامی الکتروموتور از فرمول به دست می آید. در این فرمول HP قدرت الکتروموتور برحسب اسب بخار است.
مشخصات مهم الکتریکی
مقدار جریان راهاندازی در حدود 5 الی 6 برابر جریان نامی هست. این مقدار در جدول 2 برای تمامی الکتروموتورها نشان داده شده است. مثلاً، الکتروموتور تیپ 7A و قدرت 22 کیلووات جریان نامی 43 آمپر دارد.
مقدار جریان راهاندازی 5/ 5 برابر، یعنی حدود 236 آمپر هست. اگر به دفعات مکرر و در مدت زمان محدود موتور را روشن و خاموش کنیم عبور همین مقدار جریان زیاد سبب گرم شدن سریع سیمپیچی می شود.
به همین علت فاصله زمانی بین دو دفعه روشن و خاموش کردن یک مقدار حداقلی دارد که در جدول 1 نشان داده شده است. مثلاً برای الکتروموتور مذکور در مثال بالا این مقدار 4 دقیقه هست.
اگر در فاصله زمانی 4 دقیقه بیش از دو بار موتور روشن و خاموش کنیم این عمل باعث گرم شدن بیش از حد سیمپیچی و آسیب دیدن عایق آن می شود و در نهایت در صورت تکرار، باعث سوختن سیم پیچی می شود.
گشتاور خروجی با توان دوم ولتاژ نسبت مستقیم دارد. مثلاً در اتصال ستاره مثلث چون در حالت ستاره ولتاژ به نسبت رادیکال 3 کاهش می یابد مقدار گشتاور به نسبت یک سوم کم می شود.
همچنین در راهاندازی توسط اتو ترانسفرمر چون ولتاژ به نسبت 7/ 0 برابر ولتاژ نامی کم می شود. به همچنین جهت گشتاور نیز به نسبت 49 / 0 برابر گشتاور نامی کاهش می یابد. لذا کاهش ولتاژ باعث کاهش گشتاور نامی و به همین نسبت باعث کاهش دور الکتروموتور های شناور می شود.
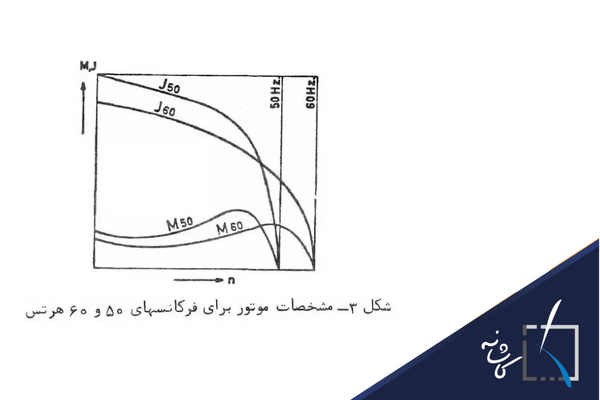
در ولتاژ ثابت با افزایش فرکانس جریان کاهش و با کاهش فرکانس جریان افزایش می یابد. در شکل (3) منحنی گشتاور جریان برحسب دور یک الکتروموتور برای فرکانسهای 50 و 60 هرتس ترسیم شده است.
افزایش ولتاژ باعث کاهش جریان الکتروموتور و افزایش جریان مغناطیس کننده و در نتیجه افزایش تلفات آهنی و آن هم باعث افزایش درجه حرارت الکتروموتور می شود.
کاهش ولتاژ باعث افزایش جریان و در نتیجه افزایش تلفات اهمی استاتور و آن هم باعث گرم شدن سیم پیچی الکتروموتور می شود.
به طوری که ملاحظه شد، افزایش و کاهش ولتاژ سبب گرم شدن سیم پیچی بدنه آهنی استاتور شده که اگر این تغییرات ولتاژ بیش از حد مجاز باشد باعث سوختن سیم پیچی خواهد شد. حداکثر تغییرات مجاز ولتاژ% 5+- ولتاژ نامی الکتروموتور بوده و در این حدود، سایر مشخصات الکتروموتور تقریباً ثابت می ماند.
عملاً در شبکه برق بیشتر با افت ولتاژ مواجه هستیم لذا جهت حفاظت در مقابل سوختن سیم پیچی لازم هست الکتروموتور در مقابل افت ولتاژ حفاظت شود.
در مورد حفاظت الکتروموتور و نیز اتوماسیون بعداً به طور مفصل بحث خواهد شد.
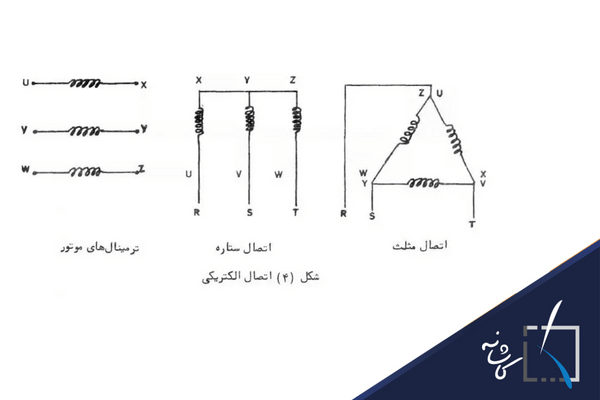
اتصال الکتریکی
سیم پیچی الکتروموتور های شناور سه فاز، از سه کلاف مجزا ازهم تشکیل یافته است هرکدام این کلافها دارای دو ترمینال خروجی بوده که مجموعاً شش ترمینال توسط دو کابل سه رشتهای به طول حدود 10 متر از الکتروموتور خارج می شوند.
حروف u1 و v1 و w1 ابتدا کلاف ها و u2 و v2 انتهای کلاف ها را مشخص می کند ممکن است در بعضی الکتروموتورها ابتدای کلاف ها، با حروف u و v و w انتهای آنها با حروف x و y و z مشخص می شوند.
برای اتصال ستاره کافی است که سه ترمینال انتهایی را به هم متصل کرده و به سه ترمینال ابتدایی سه فاز شبکه را وصل کنیم در اتصال مثلث u1 با w2 و v1 با u2 و w1 و v2 به هم متصل، سپس سه فاز شبکه را به سه نقطه اتصال وصل می کنیم.
برای تغییر جهت گردش دور موتور کافی است جای دوفاز عوض شود.











1 دیدگاه برای “الکتروموتور های شناور و کاربرد آنها – بخش اول”
سلام
خداوند اقای مهندس رحیم خانی را رحمت کند که همه جا یاد نیکویی از خود بجا گذاشته..با ایشان در همان اوایل سال 62 در دانشگاه درس داشتم و همیشه روحیه شاد و پر انرژی ایشان در انتقال مطالب فراموش نمیشود.